This post shows how to create an animated double pendulum with scipy and matplotlib.
Setup
First we import dependencies:
import numpy as np
from scipy import integrate
import matplotlib.pyplot as plt
from matplotlib.animation import FuncAnimation We define the physical constants of our problem:
L1 = 0.25
L2 = 0.20
L = L1 + L2
m1 = 1
m2 = 2
g = 9.81We define the double pendulum model:
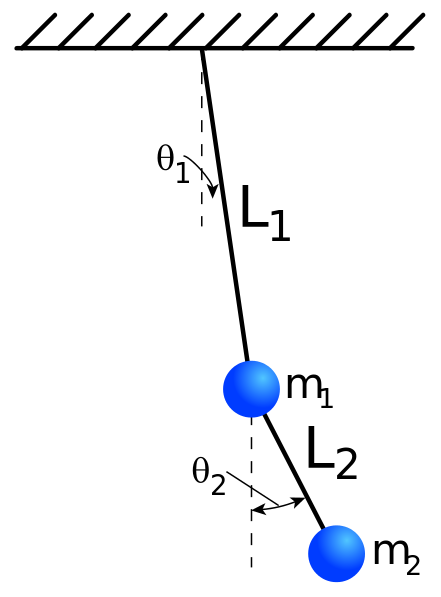
Where the system can be defined as:
![\[\ddot\theta_1 = [-\sin\Delta\theta(m_2L_1\dot\theta_1^2\cos\Delta\theta + m_2L_2\dot\theta_2^2) - g(M\sin\theta_1 - m_2\sin\theta_2\cos\Delta\theta)]/L_1\alpha\]](https://landercy.be/wp-content/ql-cache/quicklatex.com-c6a075911230db4af76505463363fa06_l3.png "Rendered by QuickLaTeX.com")
![\[\ddot\theta_2 = [+\sin\Delta\theta(ML_1\dot\theta_1^2 + m_2L_2\dot\theta_2^2\cos\Delta\theta) + g(M\sin\theta_1\cos\Delta\theta - M\sin\theta_2)]/L_2\alpha\]](https://landercy.be/wp-content/ql-cache/quicklatex.com-53a3a52296f6f1c44fdb6f54d1f019ef_l3.png "Rendered by QuickLaTeX.com")
Where:
![\[M = m_1 + m_2, \alpha = m_1 + m_2\sin^2\Delta\theta, \Delta\theta = \theta_1 - \theta_2\]](https://landercy.be/wp-content/ql-cache/quicklatex.com-998444b47eeb11e4b5c54c48dd697747_l3.png "Rendered by QuickLaTeX.com")
This highly non linear system can be represented as follow:
def model(t, y, L1, L2, m1, m2, g):
a1, a2, a1t, a2t = y
da = a1 -a2
M = m1 + m2
alpha = m1 + m2 * np.sin(da) ** 2
return np.array([
a1t,
a2t,
(- np.sin(da) * (m2 * L1 * a1t ** 2 * np.cos(da) + m2 * L2 * a2t ** 2) - g * (M * np.sin(a1) - m2 * np.sin(a2) * np.cos(da))) / (L1 * alpha),
(+ np.sin(da) * (M * L1 * a1t ** 2 + m2 * L2 * a2t ** 2 * np.cos(da)) + g * (M * np.sin(a1) * np.cos(da) - M * np.sin(a2))) / (L2 * alpha)
])Solution
We integrate the system for a given set of initial conditions and our physical setup:
t = np.linspace(0, 25, 10000)
s = integrate.solve_ivp(
model, [t.min(), t.max()],
[np.pi/2, np.pi/2, 0, 0], t_eval=t,
args=(L1, L2, m1, m2, g)
)
# message: The solver successfully reached the end of the integration interval.
# success: True
# status: 0
# t: [ 0.000e+00 2.500e-03 ... 2.500e+01 2.500e+01]
# y: [[ 1.571e+00 1.571e+00 ... 2.601e-01 2.453e-01]
# [ 1.571e+00 1.571e+00 ... 2.738e+01 2.740e+01]
# [ 0.000e+00 -9.811e-02 ... -5.950e+00 -5.910e+00]
# [ 0.000e+00 -3.260e-09 ... 9.336e+00 9.163e+00]]
# sol: None
# t_events: None
# y_events: None
# nfev: 4502
# njev: 0
# nlu: 0Time solution looks like:
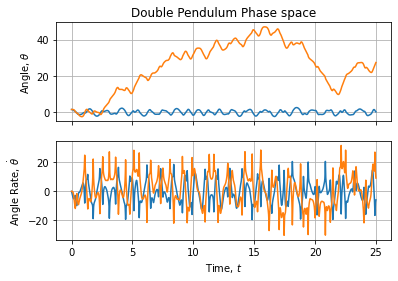
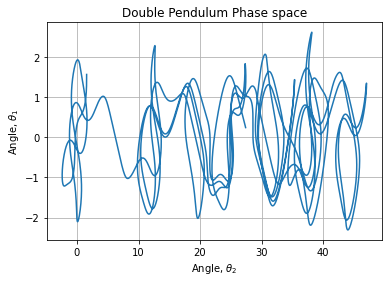
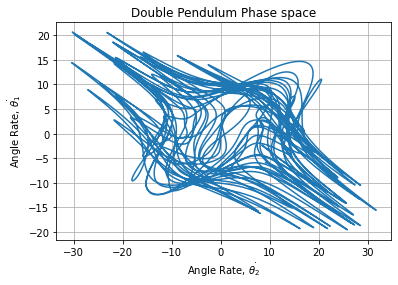
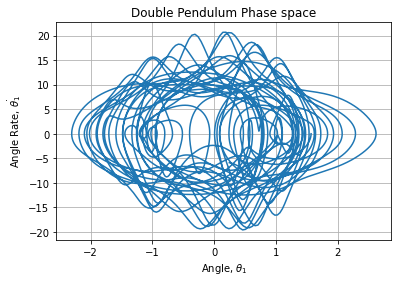
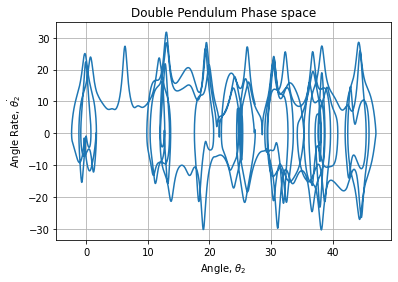
Phase spaces are about:
We transform radial coordinates into Cartesian coordinates:
def coordinate(s, L1, L2):
x1 = L1 * np.sin(s.y[0, :])
y1 = - L1 * np.cos(s.y[0, :])
return np.array([
x1,
y1,
x1 + L2 * np.sin(s.y[1, :]),
y1 - L2 * np.cos(s.y[1, :])
])
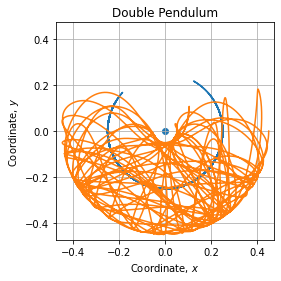
c = coordinate(s, L1, L2)We check our pendulum is kept between its physical boundaries:
assert np.all(np.sqrt(c[2, :] ** 2 + c[3, :] ** 2) <= L)Trajectory is about:
Animation
Now it’s time to create a nice animation:
fig, axe = plt.subplots()
text = axe.text(0., L * 0.9, "", horizontalalignment="center")
pendulum, = axe.plot([], [], "-o")
trajectory, = axe.plot([], [])
def init():
axe.set_title("Double Pendulum")
axe.set_xlabel(" ")
axe.set_ylabel("
")
axe.set_ylabel(" ")
axe.set_xlim([-L*1.05, +L*1.05])
axe.set_ylim([-L*1.05, +L*1.05])
axe.set_aspect("equal")
axe.grid()
return pendulum, trajectory
def update(frame):
text.set_text("t = %.3f [s]" % frame)
q = ((frame - 2.) < t) & (t <= frame)
i = np.where(q)[0].max()
pendulum.set_data([0, c[0, i], c[2, i]], [0, c[1, i], c[3, i]])
trajectory.set_data(c[2, q], c[3, q])
return trajectory, pendulum
fps = 24
dt = t.max() - t.min()
n = int(fps * dt)
animation = FuncAnimation(fig, update, frames=np.linspace(t.min(), t.max(), n), init_func=init, blit=True)
animation.save(filename="AnimatedPendulum.gif", writer="pillow", fps=fps)
")
axe.set_xlim([-L*1.05, +L*1.05])
axe.set_ylim([-L*1.05, +L*1.05])
axe.set_aspect("equal")
axe.grid()
return pendulum, trajectory
def update(frame):
text.set_text("t = %.3f [s]" % frame)
q = ((frame - 2.) < t) & (t <= frame)
i = np.where(q)[0].max()
pendulum.set_data([0, c[0, i], c[2, i]], [0, c[1, i], c[3, i]])
trajectory.set_data(c[2, q], c[3, q])
return trajectory, pendulum
fps = 24
dt = t.max() - t.min()
n = int(fps * dt)
animation = FuncAnimation(fig, update, frames=np.linspace(t.min(), t.max(), n), init_func=init, blit=True)
animation.save(filename="AnimatedPendulum.gif", writer="pillow", fps=fps)Which renders: